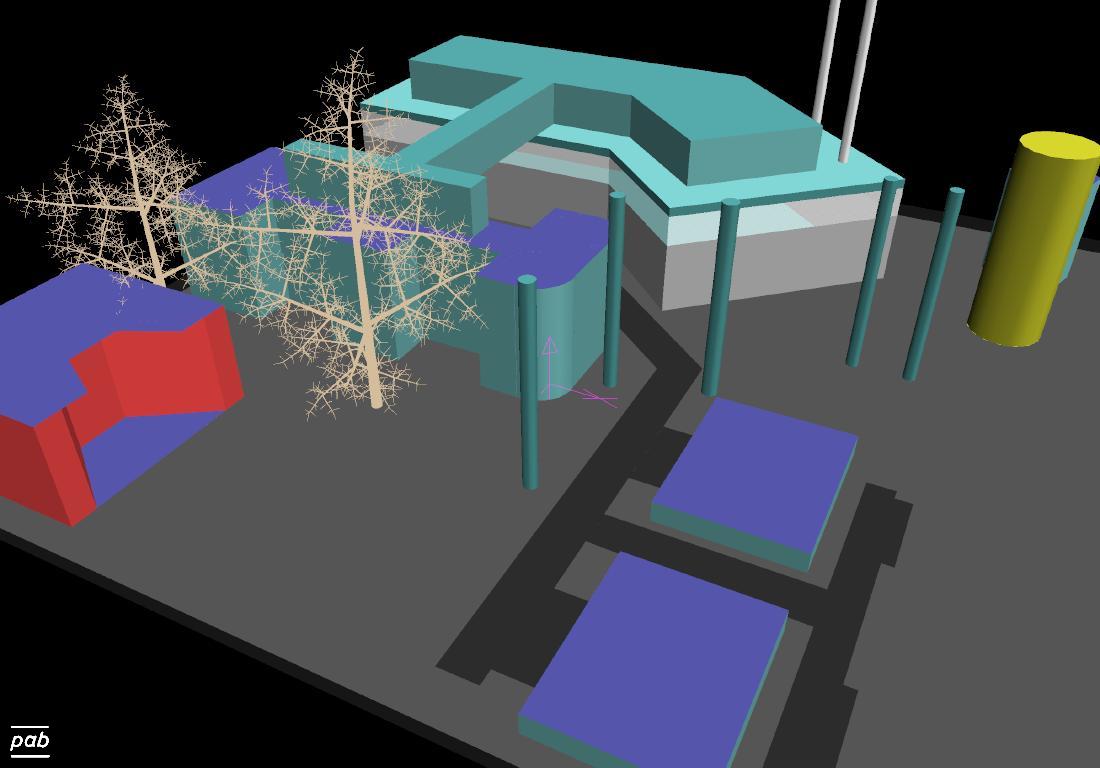
Range scanners (e.g. made by Sick AG) are effectively
3D cameras, giving the distance to objects as the "image".
Radiance is used to simulate the output of range scanners:
To illustrate their view of the world, and to generate synthetic data to test robotic vision systems.
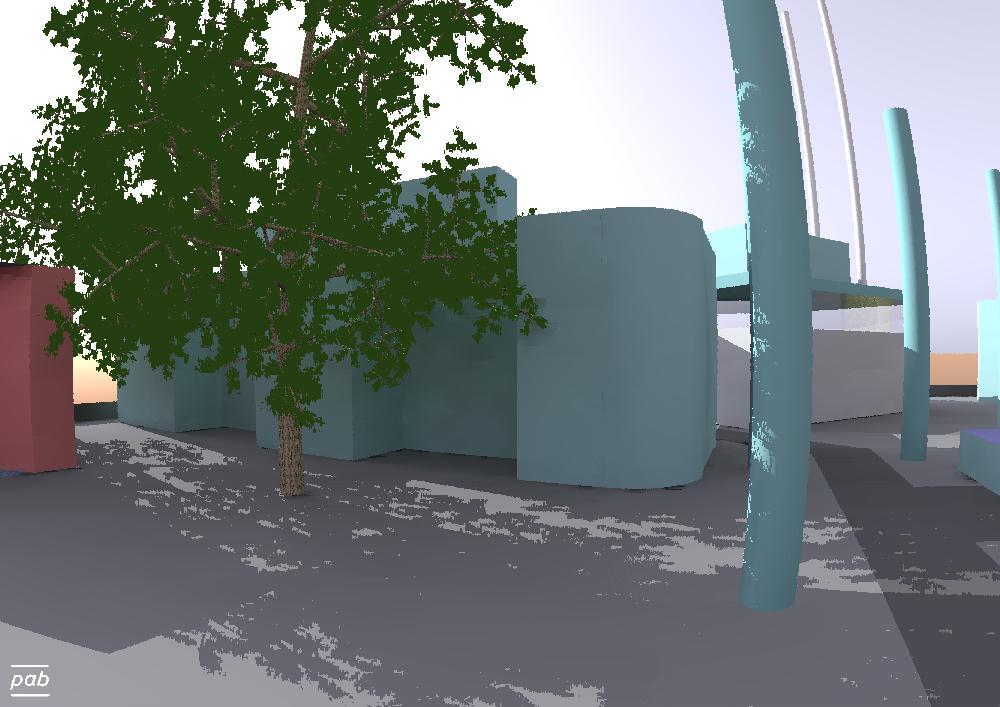
Note the decreased spatial resolution of walls parallel to view, the shadow cast by the cylinder and the fuzzy
data of the tree on the left.
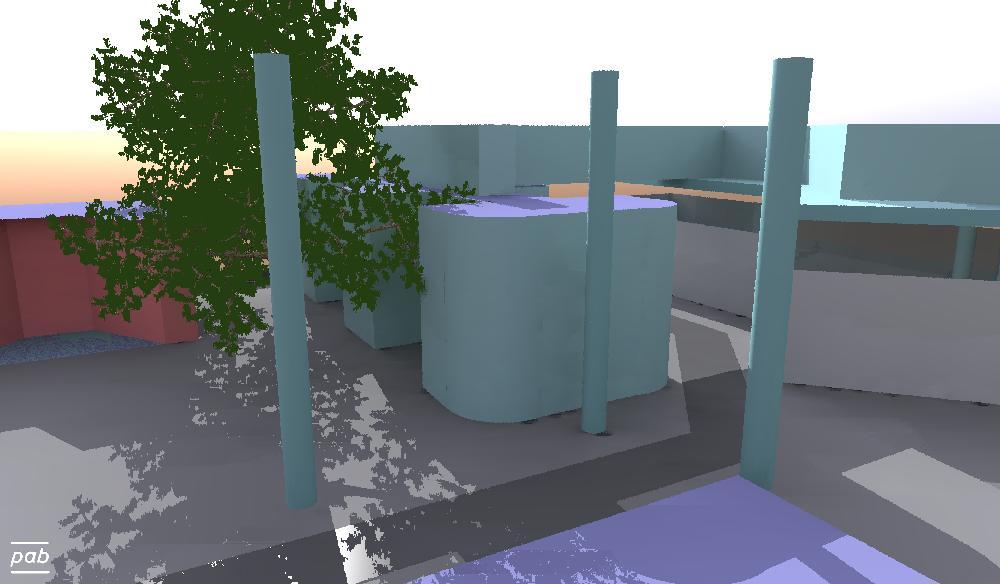
Interested observers may also spot the default rpict parameter (-pj 0.76), which jitters the ray direction per pixel,
and thus adds irregularity to the sample pattern (visible in rightmost image).
| test scene
| view of sensor
| range information from sensor
|
| actual geometry
| sensor resolution
| actual geometry
| reconstructed depth image
|
|
|
|
|
|
|